 RL Algorithm
RL Algorithm Where to Learn
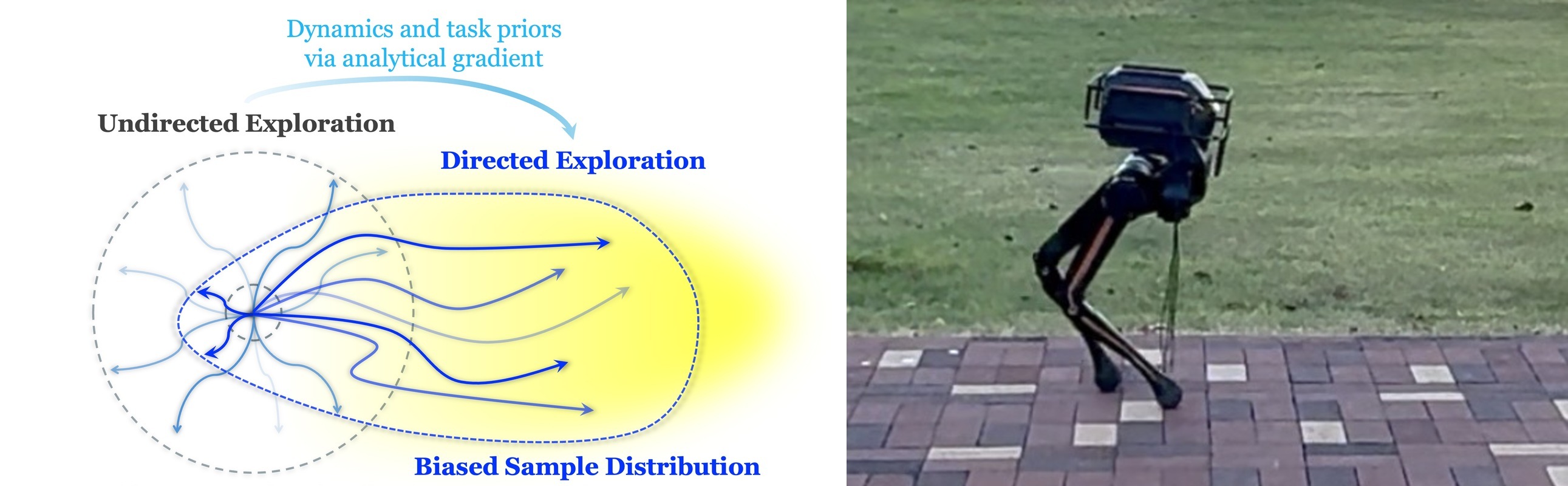
Analytical Policy Gradient Directed Exploration for On-Policy Robotic Reinforcement Learning
JaxBraxMujoco PlaygroundPPOAPG
View Details →

Zhejiang University - University of Illinois Urbana-Champaign Institute
Specializing in Learning-Based Control and Low-Level Hardware
Passionate about robotics from hardware to control. Started with low-level control systems. Now, focusing on learning-based robotics.
View Experience ↓Designed a new ROS2-based control system (Meta-ROS) for all our robots. Also responsible for new member training and mechanics-controlling co-design.
Lab WebsiteControl system for Ringbot designed by KIMLAB.
Implemented a Unix-like OS (kernel and shell) with RISC-V architecture.
Optimizing low-level control and integrating new sensors for PURE ballbot. Tried to improve simulation on omnidirectional wheels.
Lab WebsiteDeveloped autonomous parking for GEM vehicle.
Implemented a Convolutional Neural Network in CUDA.
Working on robotic learning algorithms, mainly about RL exploration and sim-to-real transfer. Aiming to motivate emergent behaviors with simple designs.
Lab WebsiteA collection of robotics projects.
RL Algorithm Analytical Policy Gradient Directed Exploration for On-Policy Robotic Reinforcement Learning
 RL Algorithm
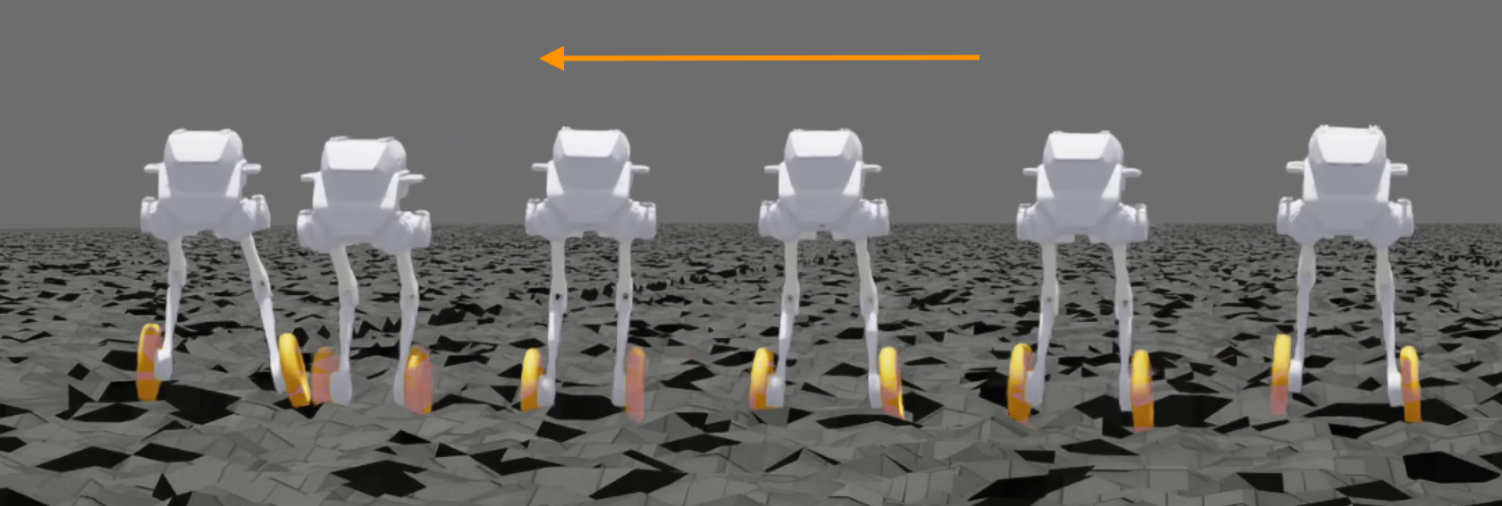
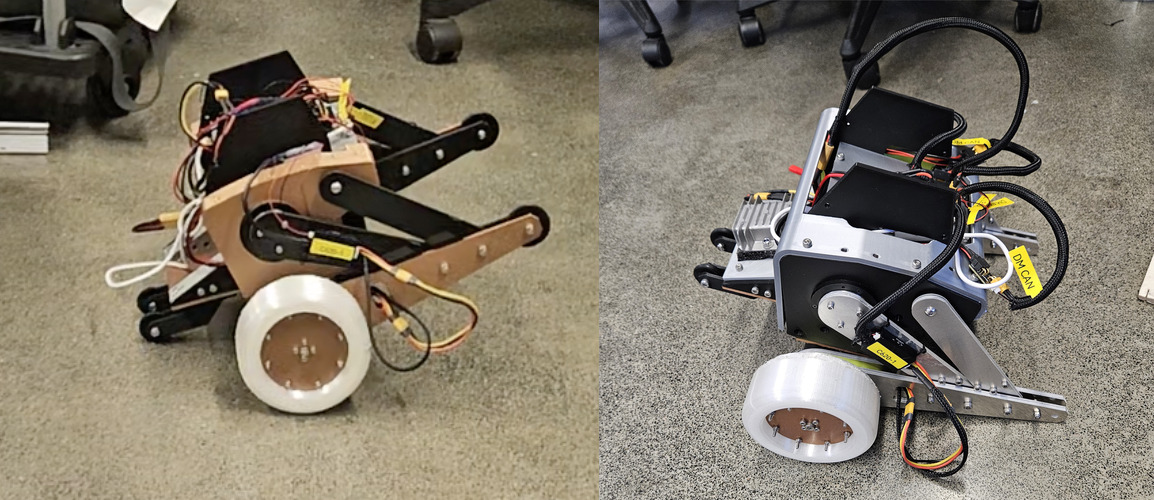
RL Algorithm Omni-directional Wheeled-Biped Robot Control with Emergent Gaits
 Low-Level Control
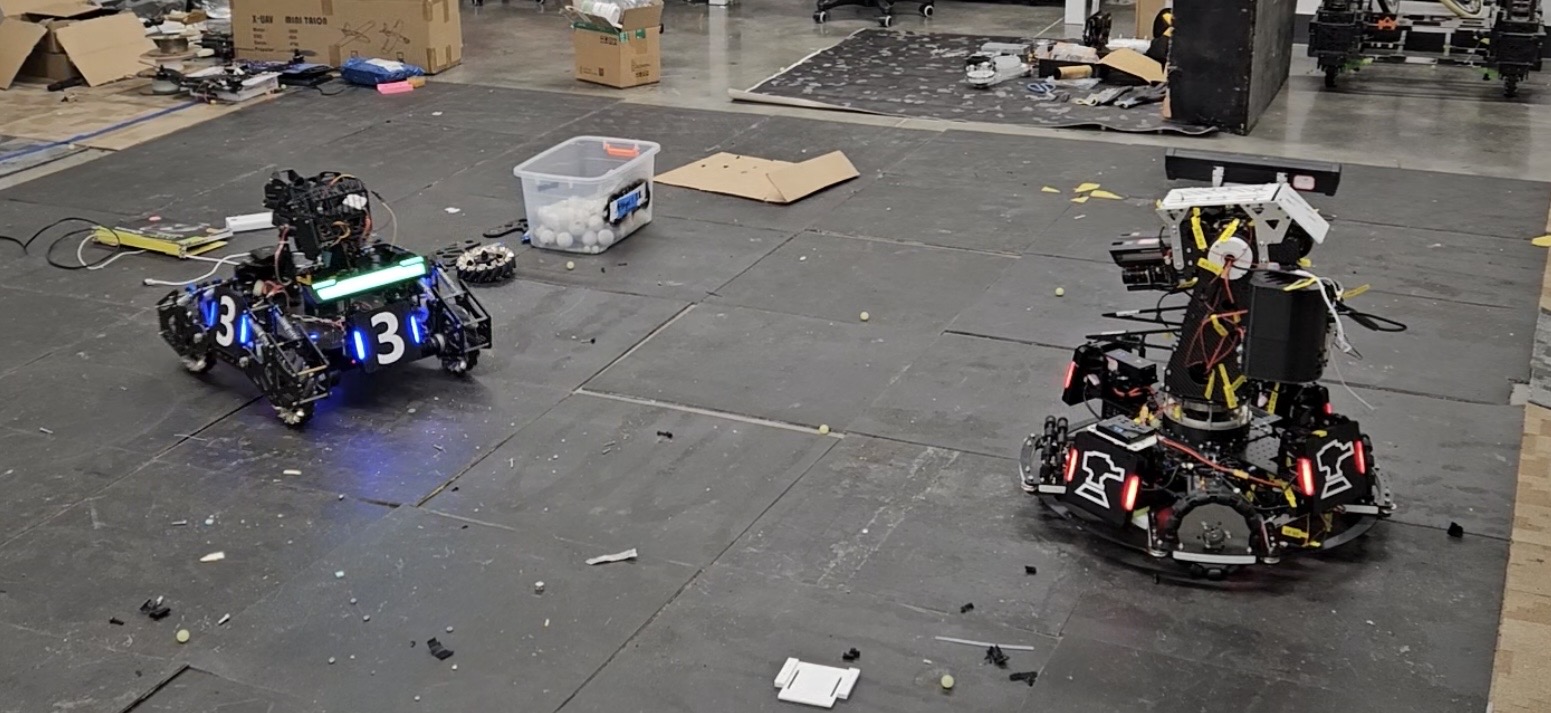
Low-Level Control Low-Level Control System Designed for RoboMaster Competition Team Meta
 Perception
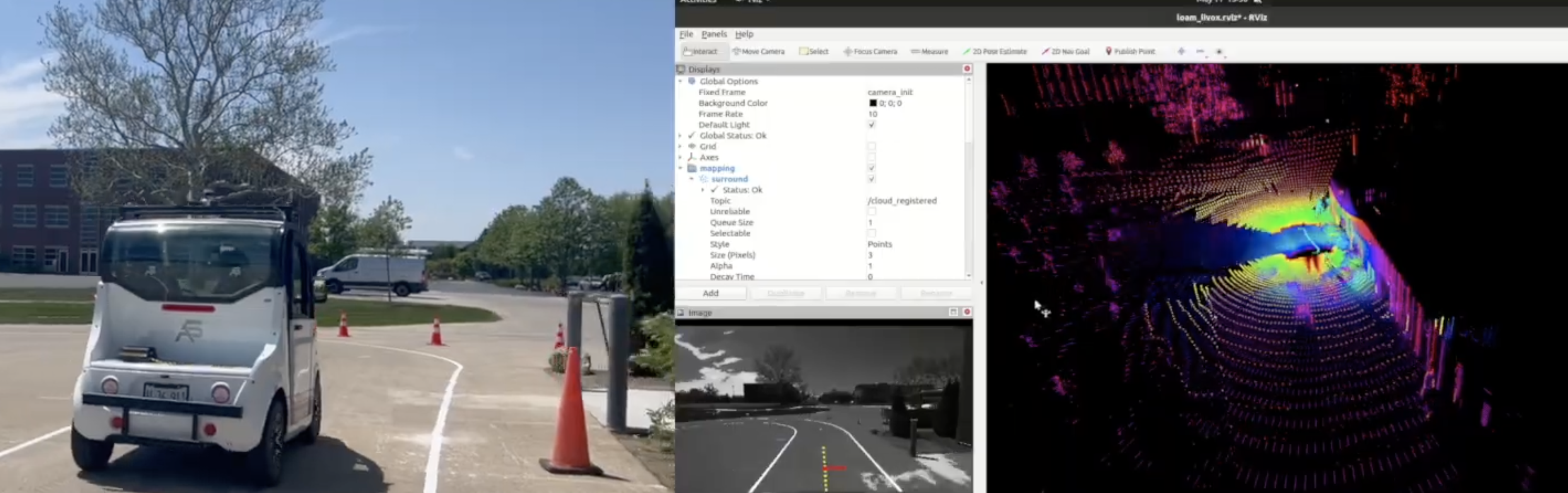
Perception ECE484 Coursework, Automated Parking System for GEM
 Low-Level Control
Low-Level Control Optimizing low-level control and integrating new sensors for PURE ballbot.
 RL Algorithm
RL Algorithm A custom wheeled biped robot with 4 DOF, featuring an RL-based locomotion controller
 Low-Level Control
Low-Level Control Low-Level Control and Hardware for Ringbot, a robot designed by KIMLAB