Introduction
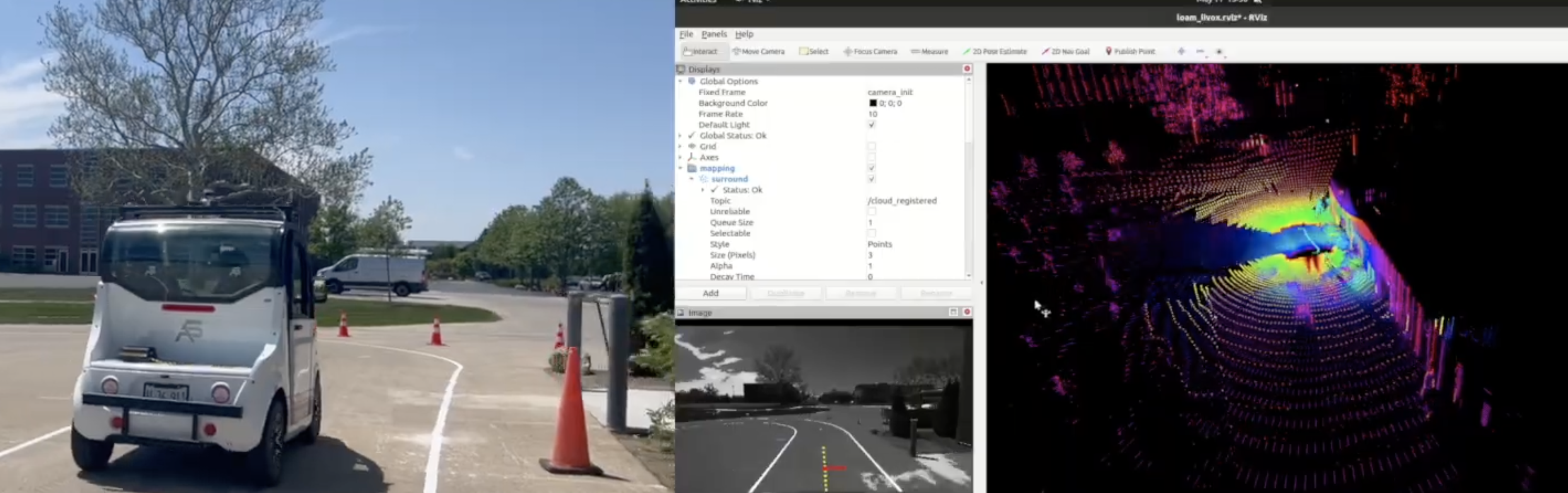
We managed to let an GEM e2 vehicle to follow lanes, localize usingonly LiDAR and IMU, and autonomously park in selected locationsusing predefined diagonal and parallel maneuvers.
We managed to let an GEM e2 vehicle to follow lanes, localize usingonly LiDAR and IMU, and autonomously park in selected locationsusing predefined diagonal and parallel maneuvers.