Introduction
This project is a comprehensive low-level control system developed for Team Meta’s RoboMaster competition robots. It leverages ROS2 for modularity and real-time performance, enabling efficient control of various robotic subsystems.
Our Robots
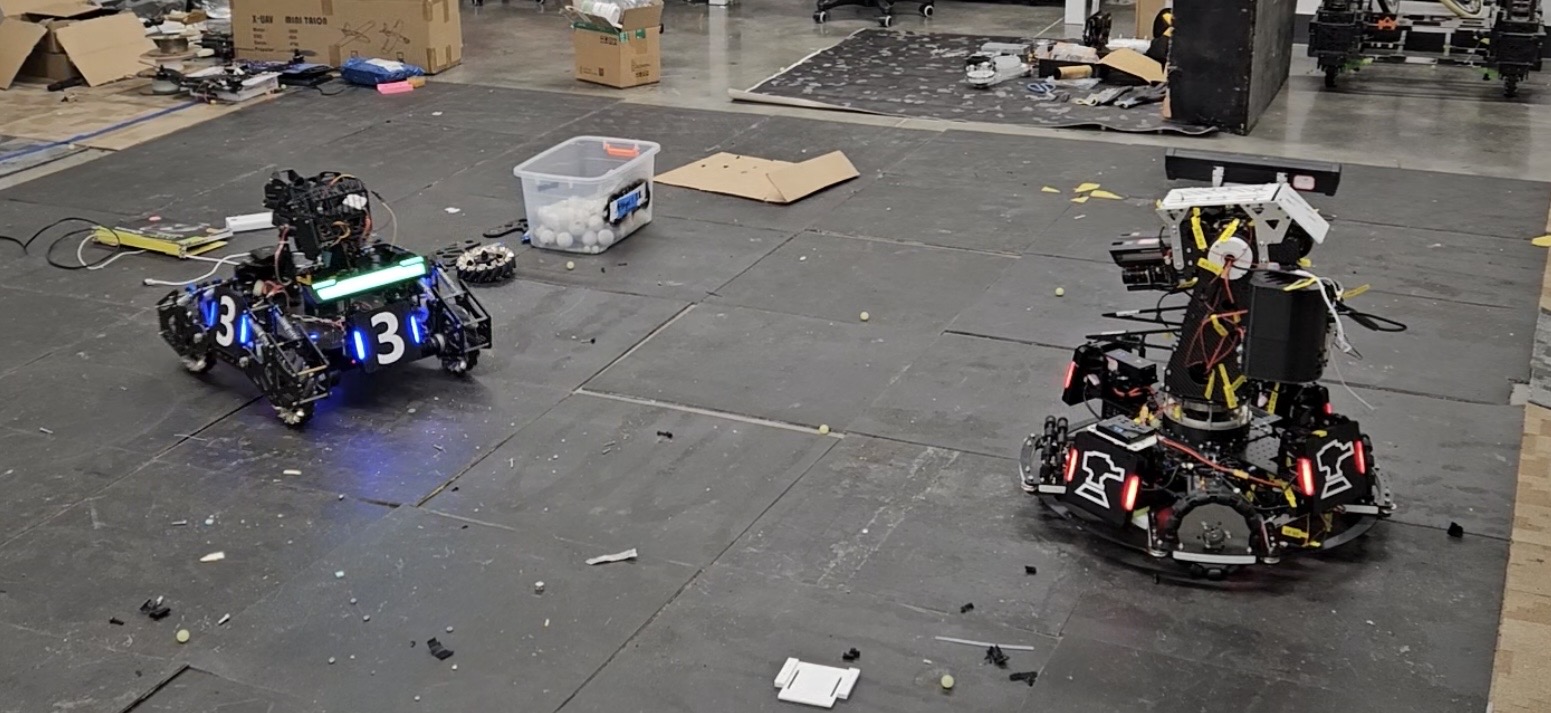
Team Meta’s “Infantry” and “Sentry” robots feature:
- Omnidirectional Movement: Equipped with Mecanum wheels for omnidirectional movement, allowing for agile navigation on the competition field.
- Automatic Aiming and Firing: Target detection based on OpenCV, combined with trajectory prediction algorithms for accurate aiming and firing.
- Autonomous Navigation: Utilizes SLAM and path planning algorithms for autonomous movement and obstacle avoidance.
Automatic Aiming and Firing Demonstration
Omnidirectional Movement Demonstration
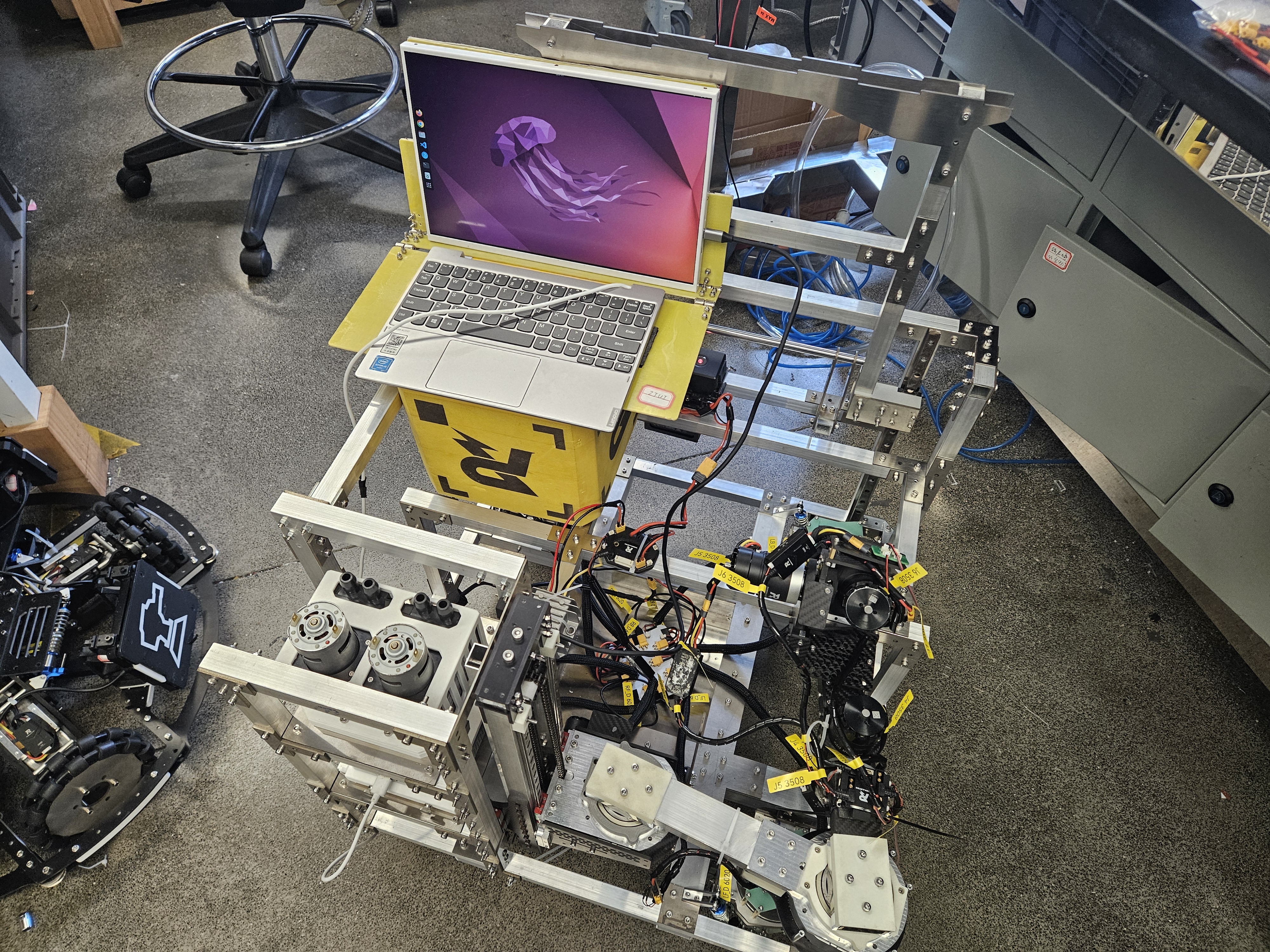
“Engineering” robot equipped with a SCARA arm for object manipulation tasks:
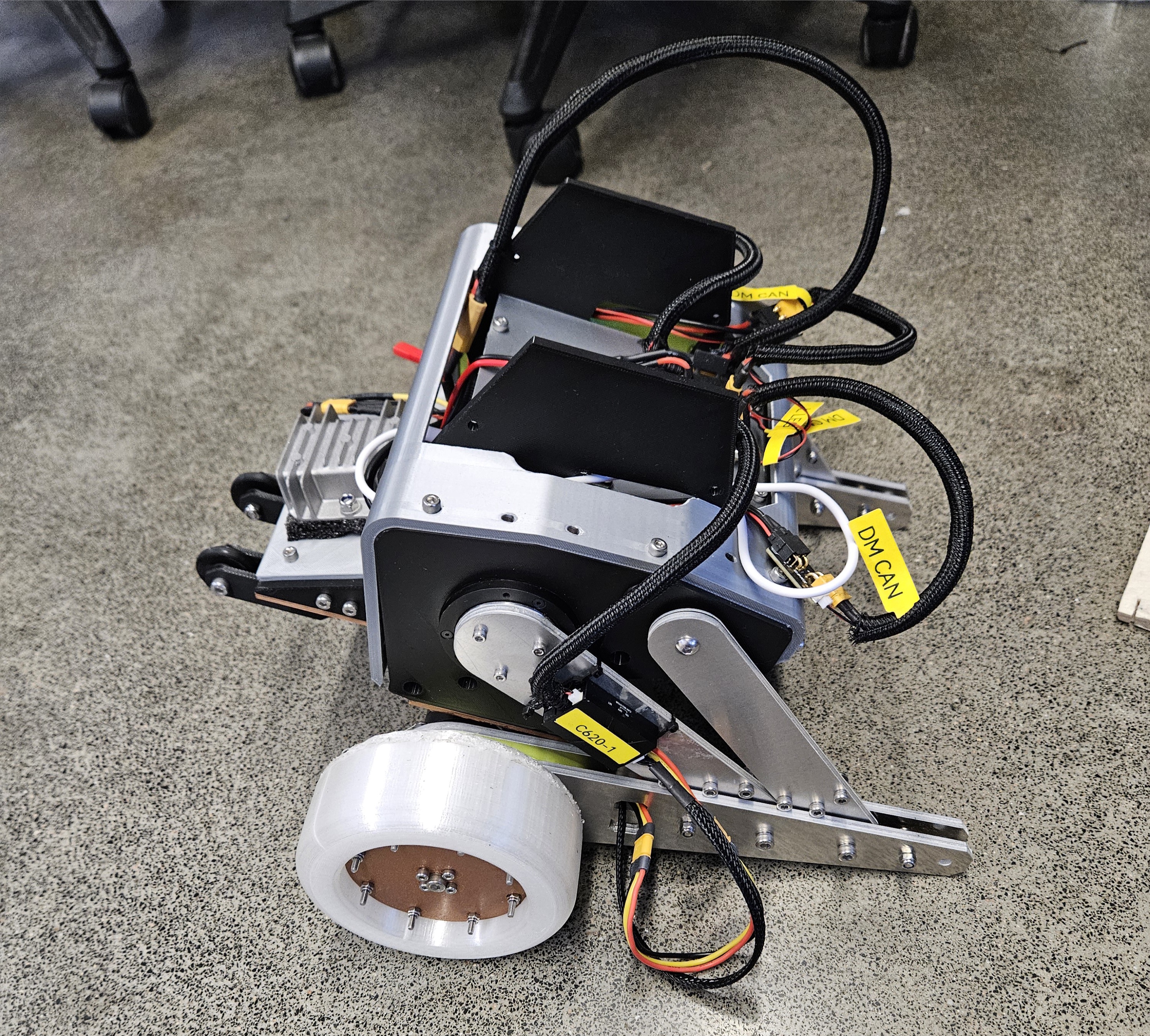
Experimental Wheeled-Biped Robot: