Overview
We designed a wheeled biped robot with 4 DOF and closed chain structure. I trained an RL-based locomotion controller in Isaac Gym using custom RSL-RL and deployed it with ROS2. It is an prototype for a larger wheeled biped robot used in our RoboMaster competition team.
Sim-to-Real Challenges
The deployment revealed significant sim-to-real transfer challenges. The robot could stand up initially but started shaking and eventually fell, demonstrating the difficulty of transferring learned policies from simulation to physical hardware.
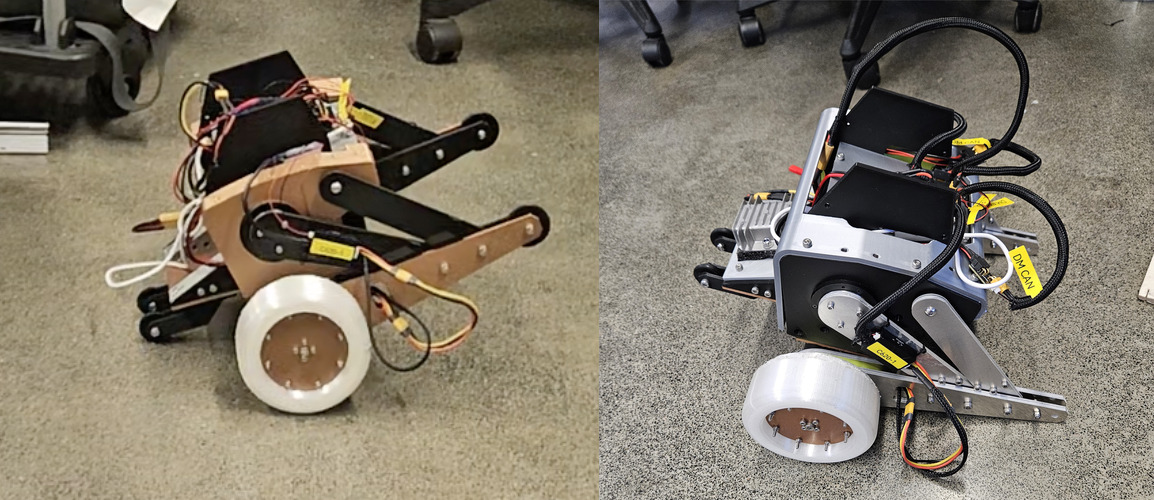
Early deployment attempt
Later deployment attempt